Trace refining a surface#
The idea of trace-refining a surface is to modify an existing surface that was derived from an intensity image in such a way that it represents the border of an object in the intensity image to the highest-possible degree. This notebook illustrates how it works and what the set parameters will do to the result.
from napari_stress import reconstruction
from napari_stress._reconstruction.fit_utils import _sigmoid, _function_args_to_list
import napari
import matplotlib.pyplot as plt
import numpy as np
from scipy.interpolate import RegularGridInterpolator
from scipy.optimize import curve_fit
from skimage import filters, morphology, measure
import vedo
viewer = napari.Viewer(ndisplay=2)
Assistant skips harvesting pyclesperanto as it's not installed.
Assistant skips harvesting pyclesperanto_prototype as it's not installed.
radius = 30
# Make a blurry sphere first
image = np.zeros([100, 100, 100])
image[50 - 30:50 + 31,
50 - 30:50 + 31,
50 - 30:50 + 31] = morphology.ball(radius=radius)
image = filters.gaussian(image, sigma = 5)
viewer.add_image(image, name='raw')
<Image layer 'raw' at 0x1867f730160>
Surface creation#
We now create a surface from this data by thresholding and marching cubes surface reconstruction:
labels = measure.label(image > filters.threshold_otsu(image)).astype(np.uint16)
verts, faces, normals, values = measure.marching_cubes(labels)
surface = (verts, faces)
Inspecting the surface shows that it has a high number of vertices - it may thus be of advantage to simplify the surface a bit before proceeding:
surface[0].shape
(17310, 3)
mesh = vedo.Mesh(surface).decimate(n=512)
mesh = vedo.Mesh(surface).smooth(niter=50).decimate(n=1024)
surface_simplified = (mesh.vertices, np.asarray(mesh.cells))
print('Number of vertices: ', mesh.nvertices)
viewer.add_surface(surface_simplified)
Number of vertices: 1025
<Surface layer 'surface_simplified' at 0x1860206ba00>
You can see that the surface still looks very voxel-like and not like the smooth object that we see in the intensity image layer.
napari.utils.nbscreenshot(viewer)

Creating trace vectors#
To address this, we first calculate normal vectors on the surface that are multiplied by a set factor, the trace_length parameter. The higher this parameter, the longer the cast normal vector along the surface will be
trace_length = 15
# Convert to mesh and calculate normals
pointcloud = vedo.pointcloud.Points(surface_simplified[0])
pointcloud.compute_normals_with_pca(orientation_point=pointcloud.vertices.mean(axis=0))
# Define start and end points for the surface tracing vectors
scale = np.asarray([1.0, 1.0, 1.0])
start_pts = pointcloud.vertices/scale[None, :] - 0.5 * trace_length * pointcloud.pointdata['Normals']
# Define trace vectors for full length and for single step
vectors = trace_length * pointcloud.pointdata['Normals']
_vecs = np.stack([start_pts, vectors]).transpose((1,0,2))
viewer.add_vectors(_vecs, edge_width=0.5, vector_style='arrow')
napari.utils.nbscreenshot(viewer)

Measuring intensity along the normals#
In order to find the “true” border of our object in the intensity image, we need to measure the intensity along each of these vectors. You can control the amount of sampled intensities along the ray using the sampling_distance parameter. Setting this parameter - for instance - to sampling_distance = 1 for a normal vector of trace_length = 10 would mean that intensity is measured 10 times along the normal with a distance of 1 between each sampled intensity. In other words: Making this parameter small, will make the following procedure more accurate, but also slower.
sampling_distance = 0.25
n_samples = int(trace_length/sampling_distance)
v_step = vectors/n_samples
# Create coords for interpolator and retrieve intensity values along the normal vector
X1 = np.arange(0, image.shape[0], 1)
X2 = np.arange(0, image.shape[1], 1)
X3 = np.arange(0, image.shape[2], 1)
rgi = RegularGridInterpolator((X1, X2, X3), image,
bounds_error=False,
fill_value=image.min())
profile_coords = [start_pts[0] + k * v_step[0] for k in range(n_samples)]
intensity_values = rgi(profile_coords)
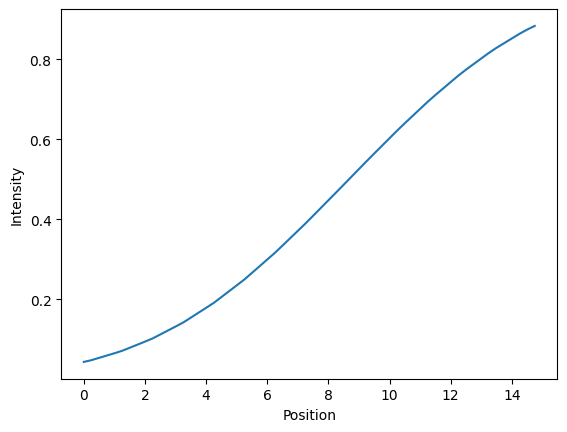
Let’s show the measured intensity for a given, single normal vector.
Note:
The intensity is increaing along the path of the vector because the vector is pointing towards the inside of the object!
The shape of the curve depends on the value of
trace_lengthandsampling_distance! Large values fortrace_lengthwill capture more of the intensity profile along the curve and lower values forsampling_distancewill make the curve more smooth
x = np.arange(0, trace_length, sampling_distance)
fig, ax = plt.subplots()
ax.plot(x, intensity_values)
ax.set_ylabel('Intensity')
ax.set_xlabel('Position')
Text(0.5, 0, 'Position')
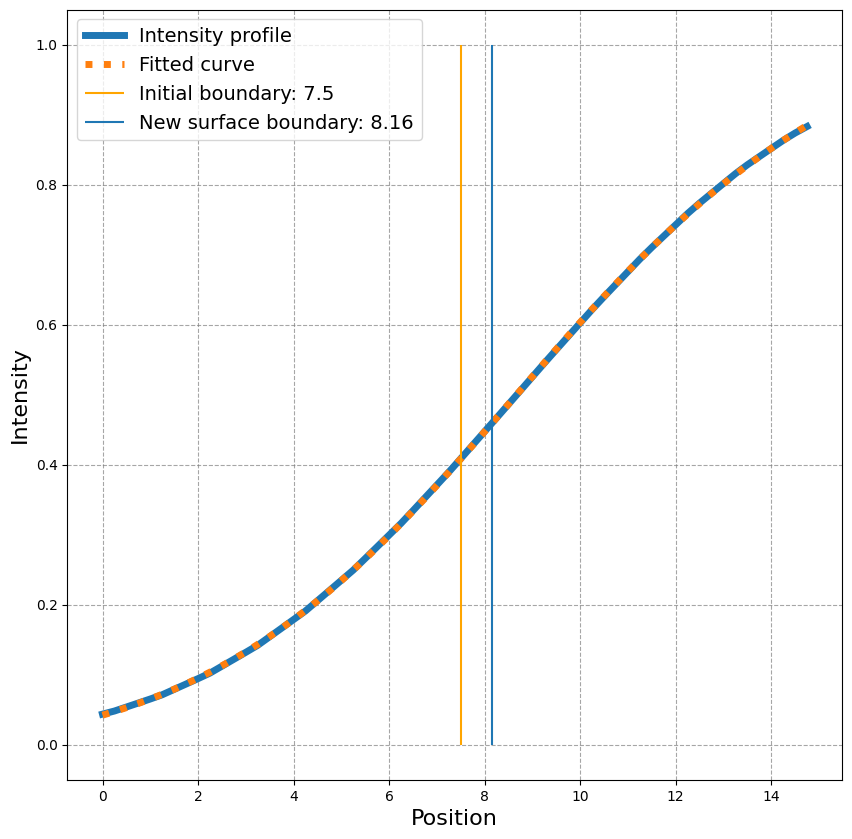
Estimate surface by fit function#
In this step, we fit a given function to the intensity profile. We demonstrate this with a sigmoidal funtion, which is suitable to approximate the intensity of fully fluorescently labeld objects. Other fit functions (e.g., a gaussian normal distribution) can also deal with objects which are labelled fluorescently only on the surface.
For the fit to work, we first need to estimate some good parameters for the sigmoidal function to start with. We can have a closer look at what parameters the sigmoidal function expects:
_function_args_to_list(_sigmoid)
['array', 'center', 'amplitude', 'slope', 'background_slope', 'offset']
A good estimate for these parameters could be the following:
# Estimate some parameters for the fit
p0 = [len(intensity_values)/2,
max(intensity_values),
np.diff(intensity_values).mean(),
0,
0]
popt, _pcov = curve_fit(_sigmoid, np.arange(len(intensity_values)), intensity_values, p0)
print('Optimal parameters:', popt)
print('Parameter errors:', np.sqrt(np.diag(_pcov)))
Optimal parameters: [ 3.26401155e+01 9.74351154e-01 7.59185619e-02 -2.31529669e-03
-2.73594475e-02]
Parameter errors: [0.27882513 0.01309349 0.00035607 0.00029409 0.00132613]
x = np.arange(0, trace_length, sampling_distance)
fig, ax = plt.subplots(figsize=(10,10))
ax.plot(x, intensity_values, linestyle = '-', linewidth=5, label = 'Intensity profile')
ax.plot(x, _sigmoid(np.arange(0, len(intensity_values), 1), *popt), linestyle = 'dotted', linewidth=5, label= 'Fitted curve')
ax.vlines(x[len(x)//2], 0, 1, label = f'Initial boundary: {x[len(x)//2]}', color='orange')
ax.vlines(sampling_distance * popt[0], 0, 1, label = 'New surface boundary: {:.2f}'.format(popt[0] * sampling_distance))
ax.legend(fontsize=14)
ax.set_ylabel('Intensity', fontsize=16)
ax.set_xlabel('Position', fontsize=16)
ax.grid(which='major', color='gray', linestyle='--', alpha=0.7)
We can now calculate the correct position for this point on the surface:
print('Previous point location: ', pointcloud.vertices[0])
print('New point location: ', start_pts[0] + popt[0] * v_step[0])
Previous point location: [20.208517 44.926617 48.310333]
New point location: [20.86000538 45.02855074 48.33879527]
Using the implemented function#
The napari_stress.trace_refinement_of_surface() function allows you to repeat this process for every point on the surface and filter the determined points according to the derived fit errors, if you want.
traced_points, trace_vectors = reconstruction.trace_refinement_of_surface(
image, pointcloud.vertices, trace_length=15, sampling_distance=0.1)
viewer.add_points(traced_points[0], **traced_points[1])
napari.utils.nbscreenshot(viewer)

Or in 3D:
viewer2 = napari.Viewer(ndisplay=3)
viewer2.add_image(image)
viewer2.add_points(traced_points[0], **traced_points[1])
viewer2.add_vectors(trace_vectors[0], **trace_vectors[1], edge_color='red')
napari.utils.nbscreenshot(viewer2, canvas_only=True)
